Goal
1ms or better accuracy on a USB-connected GPS.
Hardware
stm32f4 discovery board using a 10.5mhz internal timer is measuring the PPS interval from a Fastrax UP501 GPS reciever (claims "+/- 50 ns (RMS) accuracy"). The stm32f4 is connected via full-speed usb to a pc
Software
See: usb gps
Trials
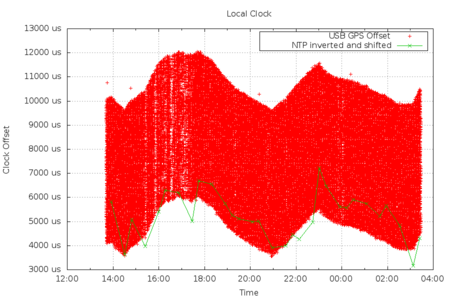
Run 1 - 6ms window between actual time and the PC's reception
After investigating these results, I found that the code was only responding to every 5th USB start of frame. Since USB SOF are every 1 ms with USB full speed, this increased the error by 5ms.
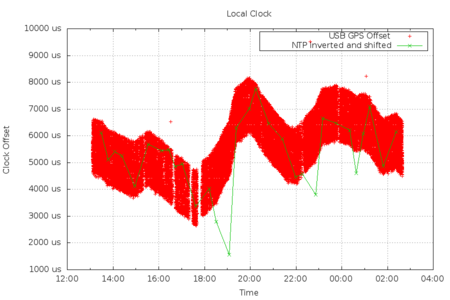
Run 2 - 2ms window between actual time and the PC's reception
Changed the micro to respond on every USB SOF if it has data, and this lowered the error
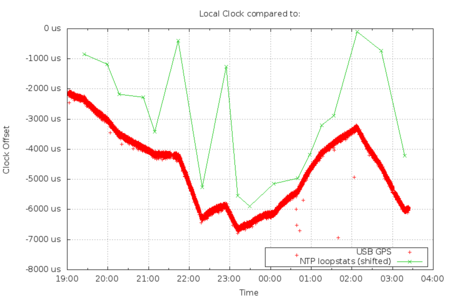
Run 3 - under 500µs window between actual time and the PC's reception
Changed the microcontroller from doing "send message on PPS" to "respond to USB poll with the current time". This way, the data is sent with the smallest buffering/transferring delay possible
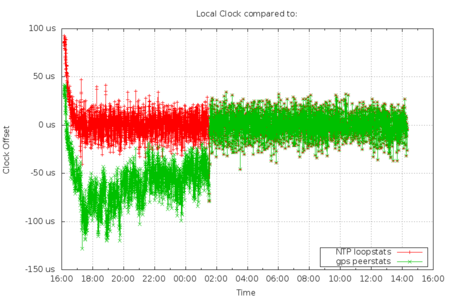
Run 4 - under 50µs window between actual time and the PC's reception
Changed the timer signal to a one byte message and sent the timestamps/offsets to NTP via the shm driver
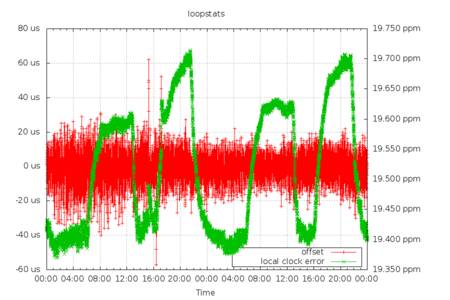
Run 5 - 90.4% of samples within 40 µs of mean
Changed the NMEA data to go through the microcontroller and over USB, as well as changing the timestamp measurement software on the PC to run under a realtime scheduler
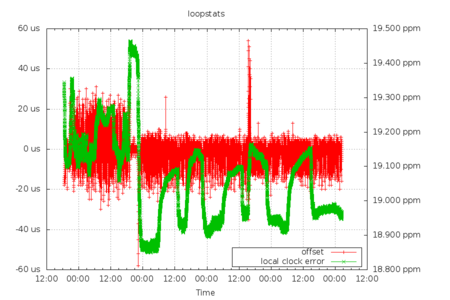
Run 6 - 90.9% of samples within 22 µs of mean
The timestamps of the USB byte are now measured in the kernel
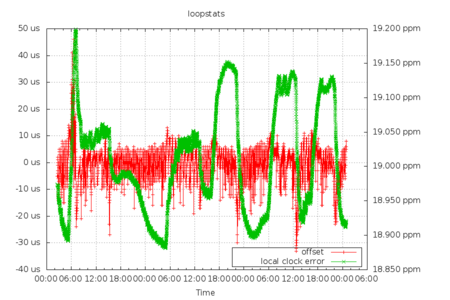
Run 7 - 90.8% of samples within 20 µs of mean
Experimented with a 32 second NTP poll instead of a 16 second poll
Run 8 - 90.8% of samples within 19 µs of mean
Switched back to a 16 second NTP poll, worked around a bug where the GPS module would send the same NMEA timestamp twice, switched the micro to send its clock info at 2HZ. No significant difference with run 7.
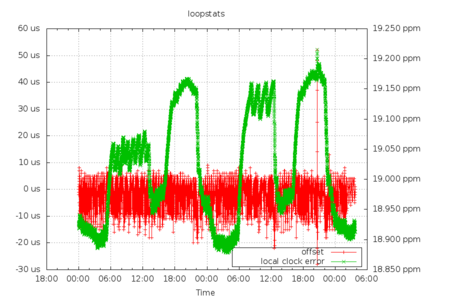
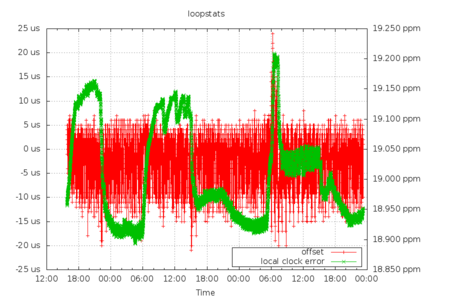
Run 9 - 91.2% of samples within 19 µs of mean
Added a simple filter of dropping samples 10us outside of the running average offset
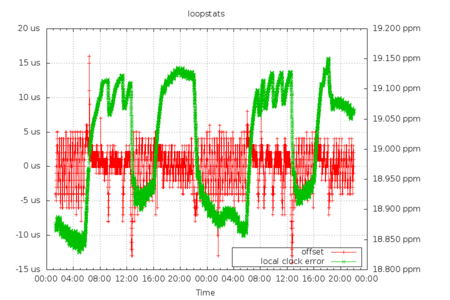
Run 10 - 90.6% of samples within 18 µs of mean
Filter now measures the difference between the moving average offset and the measured offsets for the past 192 seconds, and selects a filter that discards 80% of the samples before selecting the offset to send to NTP. The micro's PLL now uses 2mhz as its intermediate frequency instead of 1mhz, to evaluate its effect on jitter