STM32F4 time experiments
other runs
Goal
1ms or better accuracy on a USB-connected GPS.
Hardware
stm32f4 discovery board using a 10.5mhz internal timer is measuring the PPS interval from a Fastrax UP501 GPS reciever (claims "+/- 50 ns (RMS) accuracy"). The stm32f4 is connected via full-speed usb to a pc
Software
See: usb gps
Changes from Run 5
Timestamp the USB byte in the kernel
Comparing kernel timestamp vs realtime timestamp
Min and Max offsets within the 16 second cycle
userland on the left, kernel on the right
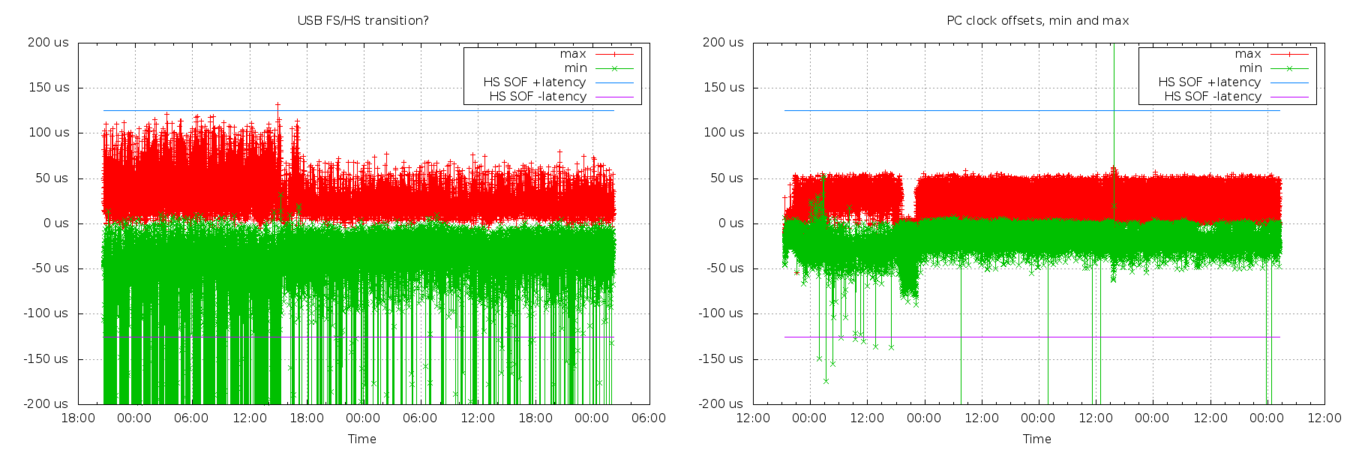
Notes: (userland timestamping) realtime enabled at day 1@~15:00 (kernel timestamping) moderate cpu/disk activity started at day 1@20:33, ended day 2@~17:30. Heavy cpu/disk activity started at day 2@18:31, ended day 2@23:15. VM enabled at day 3@15:23 and ended day 3@16:31
Even under high load, the window on the kernel side between min/max is limited in size. CPU scaling frequency had a huge impact. Turning on a VM on the machine caused a large time error.
ntpd's measurement of jitter
userland on the left, kernel on the right
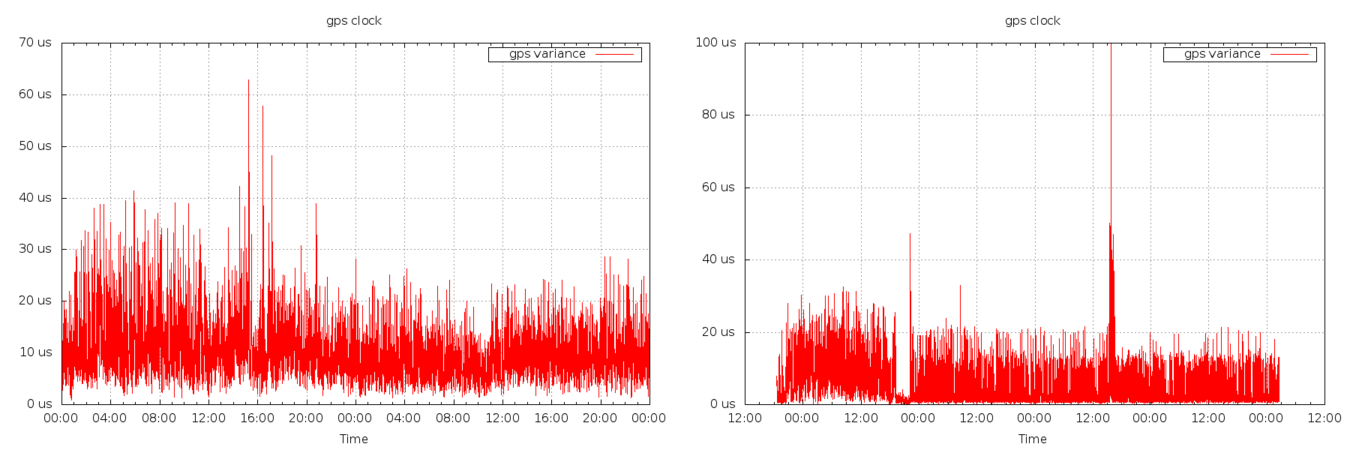
See the graph above for the explanation of the different patterns (spikes, low areas). Kernel timestamping lowered the jitter.
Histogram
This takes all samples within a 16 second window and graphs the number of samples within X µs of the mode
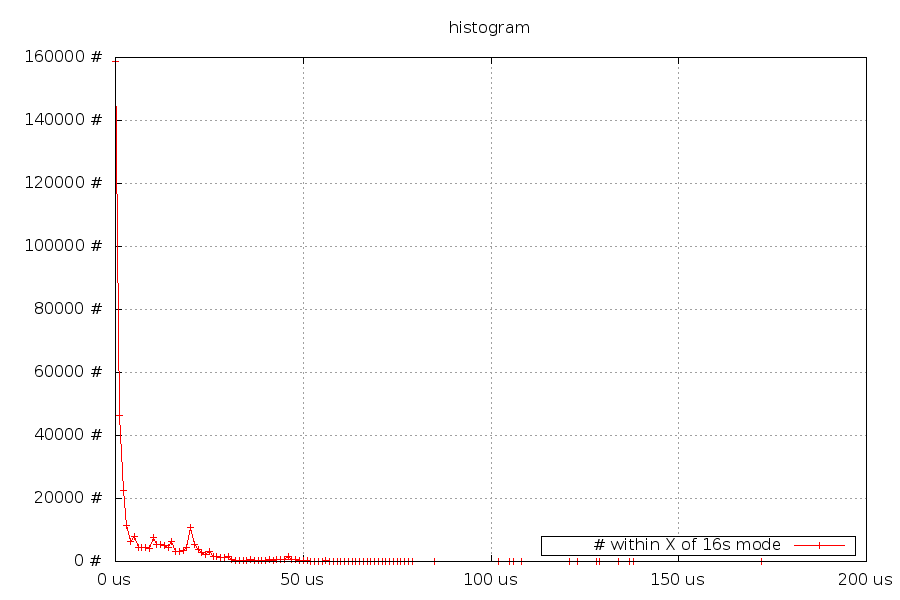
Comparison between run 5 and run 6:
| percentile | Run 5 | Run 6 |
|---|
| 50% | 10 µs | 3 µs |
| 90.0% | 40 µs | 22 µs |
| 99.0% | 153 µs | 46 µs |
| 99.9% | 922 µs | 56 µs |
Run 6 changes resulted in a signficant reduction in variance
PC clock
Loopstats graph - local clock error (PPM, green) and USB/GPS offset (µs, red)
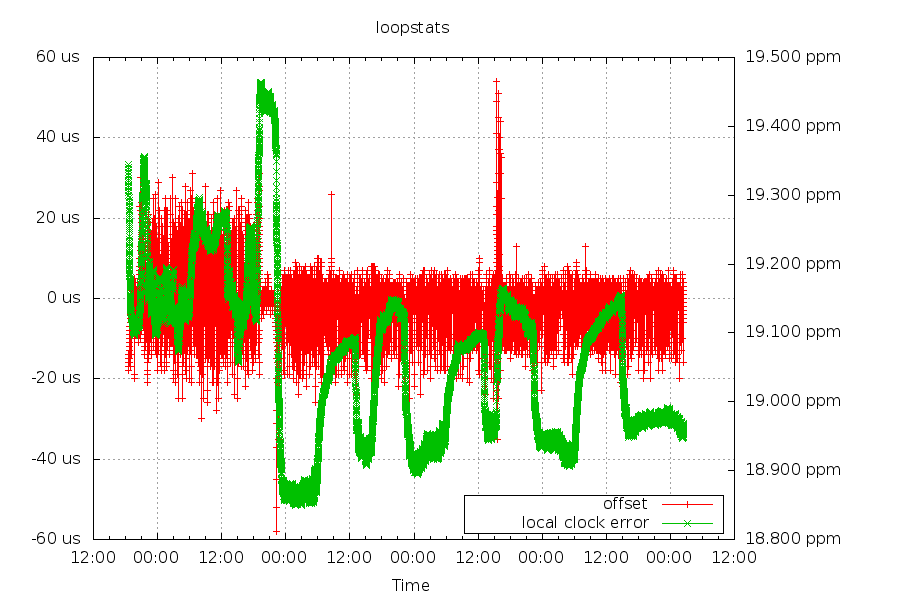
The heavy CPU usage between the start and day 2@23:15 is evident in the local clock PPM error (heavy CPU usage = higher temperature). The impact of starting the VM on day 3@15:23 is evident in the offset
Overall conclusion
This change lowered the 90 percentile window from 40µs to 22µs
Future enhancements
- Use USB High Speed (avoid the PC's built-in High Speed/Full Speed hub) - I'd need to get a USB HS PHY for this
- Use a OXCO or other higher-quality oscillator for the microcontroller
- Add a display to the microcontroller